
CHMURY PUNKTÓW
Najważniejszą cechą procesu BIM (Building Information Modeling) jest zbieranie, opracowywanie i zarządzanie informacją o wszelkich elementach obiektu, czyli podmiotu danego opracowania. Informacje zawarte w modelu są pozyskiwane w procesie jego tworzenia z wielu różnych źródeł. Sposób ich zdobywania, ale przede wszystkim zakres i organizacja wewnątrz modelu, są jednym z ważniejszych zagadnień ustalanych na etapie planowania działań pod kątem BIM.
Maciej Spiess
Inżynier ds. BIM
AEC Design
Odpowiednie podejście do automatyzacji i optymalizacji pozyskiwania danych oraz wprowadzania ich w środowisko modelu niejednokrotnie decyduje nie tylko o poziomie jakości i dokładności opracowań, ale również zahacza o problemy opłacalności czy też nawet możliwości sprostania stale skracającym się harmonogramom.
Chmury punktów a BIM
Pojęcie chmury punktów funkcjonuje w branży budowlanej od bardzo dawna. Rozwój tych technologii w parze z rozwojem BIM dał z kolei szansę na coraz szersze zastosowanie w nowszych skalach, dokładnościach i etapach projektu. Samo pojęcie oznacza zestaw namierzonych punktów w przestrzeni, których położenie rejestrowane jest względem ustalonych punktów referencyjnych. Dane składające się na chmurę punktów najczęściej pozyskiwane są z laserowych skanerów 3D. Tak zapisane dane mogą służyć do wielu różnych celów. Na ich podstawie można wnieść bardzo wiele informacji do projektu, ale równocześnie ogromna ilość tej informacji stanowi pewien oczywisty kłopot.
Cele wykorzystania
Modele BIM opracowywane są w różnych celach w zależności od specyfiki danego zadania. Od najbardziej domyślnej kategorii nowo projektowanych budynków kubaturowych przez otaczające je budynki istniejące (modelowanie na potrzeby kontekstu, analiz, przebudów, rewitalizacji lub modernizacji), wirtualny zapis miejsc dziedzictwa kulturowego, aż po modele na potrzeby zarządzania już zbudowanych, funkcjonujących obiektów. Chmury punktów sporządzane na potrzeby tych wszelakich zastosowań procesu BIM w różnorodnych przedsięwzięciach odpowiadają specyfice danego zadania. To na przykład skanowanie stanu istniejącego budynków, infrastruktury, terenu przed rozpoczęciem prac projektowych. Skanowanie wykonanych etapów prac budowlanych na potrzeby sprawdzenia poprawności względem dokumentacji projektowej. Skanowanie istniejących, nierzadko zabytkowych obiektów na potrzeby inwentaryzacji, podstawy do projektów modernizacji lub odbudowy. Każdy kolejny cel i przez to zakres wykonania pomiaru ma szereg konsekwencji w doborze właściwej metody skanowania i użytych narzędzi, zdefiniowanych dokładności oraz przyjętych sposobów organizacji otrzymywanych danych.
Metody pozyskiwania
Podstawową metodą pozyskiwania danych do stworzenia chmury punktów są szeroko pojęte laserowe skanery 3D. Sama technologia rejestracji położenia danego punktu w przestrzeni za pomocą triangulacji wiązki laserowej to wbrew pozorom nie wymysł najnowszej myśli XXI wieku. Pierwsze skanery laserowe używane były już pod koniec lat 70. XX w. Od tamtego czasu oczywiście cały proces odbywa się cyfrowo, wszystko jest bezpośrednio związane z komputerowym wspomaganiem, a ostatecznie przede wszystkim jesteśmy w stanie zmierzyć wielokrotnie więcej, szybciej i dokładniej, by na koniec otrzymać pakiet informacji gotowy do dalszej obróbki.
Drugi aspekt rozwoju technologii skanowania wiąże się z różnorodnością pod kątem przestrzennej organizacji całego procesu, czyli mobilności instrumentów, zasięgu pracy, rozdzielczości pozyskiwanych pomiarów, a na koniec możliwości płynnego połączenia wyników pomiarów z wielu kolejnych stanowisk w celu stworzenia jednej wielkiej, wspólnej chmury punktów. Pod kątem mobilności skanowanie 3D zyskuje dzięki rozwojowi technologii dronów. Opcja rejestracji za pomocą latających, zdalnie sterowanych skanerów otwiera nowe możliwości pod kątem dostępności do trudnych miejsc, ale przede wszystkim czasu skanowania. Poza latającymi dronami występują też skanery zdalnie sterowane poruszające się na kołach lub gąsienicach, które można wykorzystać do skanowania miejsc trudno dostępnych albo w niebezpiecznych warunkach (np. wnętrze zbiorników na różne substancje). Zmiana pozycji skanera to przede wszystkim manewrowanie jego polem roboczym, ale to, co skaner „widzi”, jest również związane z pojęciem cienia w skanowaniu, czyli nieosiągalnych części obiektu, które są po prostu zasłonięte innymi elementami, jakie przeszkadzają w dotarciu tam wiązek lasera.
Alternatywnym procesem do pozyskiwania danych ze skanerów laserowych jest pojęcie fotogrametrii. Jest to mechanizm tworzenia trójwymiarowego modelu na podstawie serii zdjęć wykonanych pod różnym kątem i z różnych stron. W połączeniu z informacją o dokładnym położeniu instrumentu, który wykonuje te zdjęcia pomiarowe, możliwe jest stworzenie dokładnej przestrzennej reprezentacji badanego obszaru. Dokładność skanowania laserowego natomiast jest zwykle większa.
Skanowanie wykonane – co dalej?
Sama idea automatycznego pozyskania ogromnej ilości danych, które mogą zastąpić procesy ręcznego mierzenia i opracowywania, wydaje się czymś, co nie wymaga zastanowienia. Poza oczywistą przeszkodą, jaką są wciąż wysokie koszty wykonania takich skanów (koszty systematycznie maleją wraz z rozpowszechnianiem się tej technologii), musimy odpowiedzieć sobie na proste pytanie: co dalej z tym workiem informacji, który udało się uzyskać? Po wykonanych kolejnych pomiarach na miejscu, w różnych pozycjach i kierunkach skanera itd. potrzebujemy dokonać procesu połączenia tych poszczególnych obrazów w jeden spójny zestaw punktów. Ten proces nazywa się rejestracją chmury punktów i zazwyczaj korzysta z ustawionych, wspólnych dla kolejnych faz pracy skanera punktów referencyjnych. Dzięki temu, że kolejne pomiary „nachodzą” na siebie i potrafią uzyskać jednoznaczną lokalizację tych wspólnych punktów, chmura punktów może istnieć jako jedna całość pomimo podziału na etapy powstawania jako obraz z różnych punktów (lub stacji) pomiarów. Tak przygotowana chmura punktów może istnieć w jednym z kilku formatów i jest obsługiwana przez wiele różnych programów projektowych. Może być użyta w tej formie jako podkład, referencja lub podstawa do dalszego modelowania, na przykład w Autodesk Revit. Kolejna możliwość to prawie automatyczne przekształcenie zestawu punktów w przestrzeni na powierzchnie/siatki, czyli bardziej namacalne formy, za pomocą narzędzi, jak Autodesk 3ds Max.
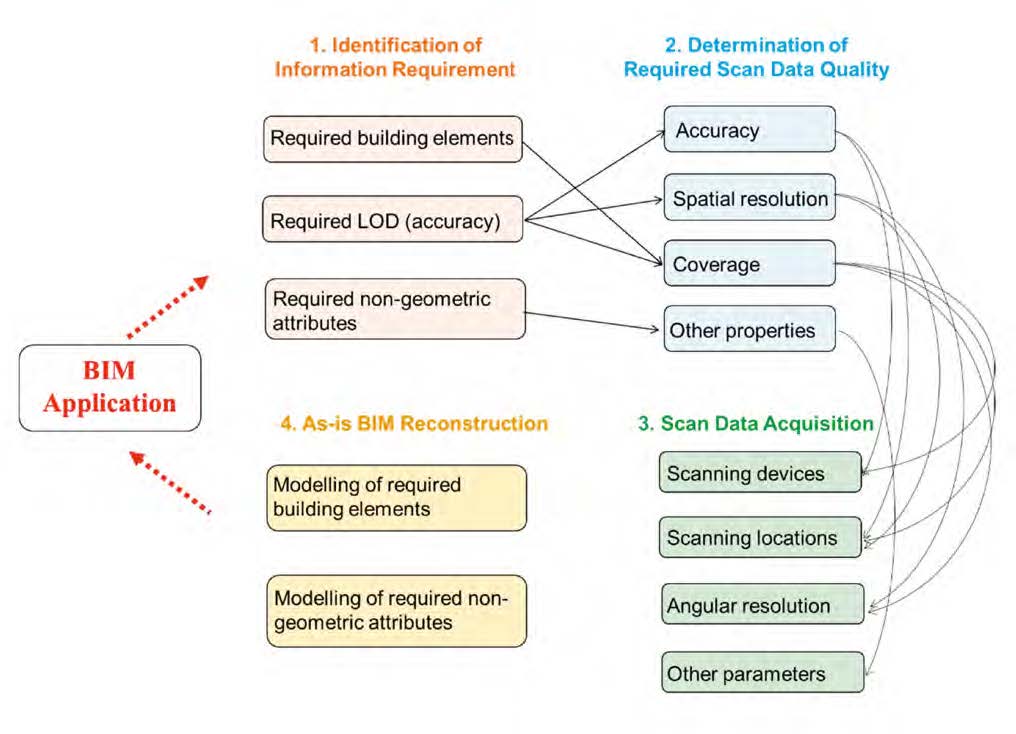
Jeśli celem opracowania wyników naszego skanowania jest model BIM, to pojawia się problem. Ilość informacji i sposób, w jaki są zorganizowane, nie do końca jest gotowy do wykorzystania bezpośrednio w parze z obiektami typu ściana, strop czy okno i drzwi. Żeby dojść do uproszczonych w geometrii kształtów podstawowych obiektów, z których składają się nasze modele BIM, potrzebujemy etapu modelowania.To zazwyczaj najbardziej czasochłonny etap całego procesu. Wymaga stworzenia obiektów idealnych (prosta ściana o stałej grubości) w oparciu o dokładnie namierzone niedokładności nieidealnie wykonanych elementów w realnym świecie. Takie modele tworzone są na podstawie szeregu wytycznych i ustaleń, a podstawowymi są – poziom dokładności skanowanych elementów (LOA) oraz poziom szczegółowości modelowanych odzwierciedleń (LOD). Wraz z rozwojem programów wspomagających obsługę namierzonych chmur punktów powstało już kilka narzędzi do automatycznego wykrywania skanowanych obiektów i generowania ich kształtów oraz przebiegów do wykorzystania jako model BIM. Każde z tych narzędzi jednak zwykle specjalizuje się w którejś branży lub wymaga uzupełnienia modelu o pewne treści. Przy bardzo dużych obiektach natomiast każda automatyzacja w ostatecznym obrabianiu chmury punktów na cele stworzenia pełnego modelu BIM może być bardzo dużą oszczędnością czasu i pieniędzy.
Źródło: www.mdpi.com